
Tabor's Advanced Engineering class received a $10,000 Lemelson-MIT InvenTeam grant to create a Remote Operated Vehicle named Sammy the Seabot. Sammy will monitor water quality variables in Buzzards Bay. The following blog post is from the different teams in the Engineering class as they work to create Sammy over the course of the semester!
Sensor and GPS/Data Group
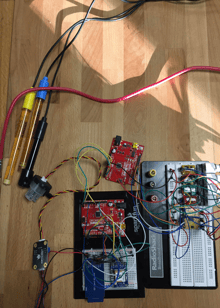 So far, the sensor group has made great progress towards our goal of a completely independent sensor module. We have two arduinos that talk to each other. One reads the atlas scientific sensors and another receives that data from the first arduino and handle all the other sensor data.
So far, the sensor group has made great progress towards our goal of a completely independent sensor module. We have two arduinos that talk to each other. One reads the atlas scientific sensors and another receives that data from the first arduino and handle all the other sensor data.
We are now adding the final touches to the code, and adding a turbidity sensor. In preparation for shrinking the entire operation, we are also designing a custom circuit board that will handle all the electronics. We are making good progress and hope to be done before march.
Sensor Package Group
We are currently working on the sensor package tube but we are having trouble making the package completely waterproof. We are making a removable water seal from scratch to fit on one side of the tube. This tube will hold the arduino boards and each sensor’s wires. There will be a hole for the sensor wires to come out of so the sensors may be in the water but the arduino boards will not be affected. Our main challenge is keeping water out of the tube but also making the seal removable.
 Underwater ROV Group
Underwater ROV Group
The underwater ROV has had a successful test run in the ocean-water tank in the MANS center. It is able to go up, down, left, right, and take videos. We are currently working on attaching a depth sensor to the ROV as well as a Niskin Water Sampler.

Sampler Group
We have proceeded to 3D print all parts of the OpenROV Niskin bottle and construct it. The only part needed is a strong elastic band. For now, we will test the bottle using cut elastic tubing. The other water sampling device is ready to test, but needs to have a casing for the electrical equipment.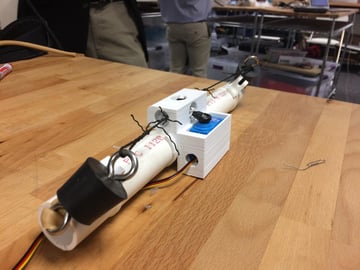
In the past month, we have created two types of water sampling devices for each ROV. We have created a larger water collecting apparatus for the surface ROV, using solenoid valves and Arduino code to trigger it. This water sampler is completed, and the only thing left is for it to be integrated into the rest of the surface ROV’s systems. The OpenROV will use a 3D printed design for a Niskin bottle that is much smaller than its surface ROV counterpart. It is still undergoing testing and is in need of better elastic and code. Our progress is coming along nicely, and we can’t wait to see the end result.







